1.1 Kinematics
The study of the motion of the objects without taking into account the cause of their motion is called kinematics.
1.2 Frame of reference :
Three mutually perpendicular lines intersecting at a point is called frame of reference. Intersecting point is called the origin and three lines are named as X, Y & Z axes.
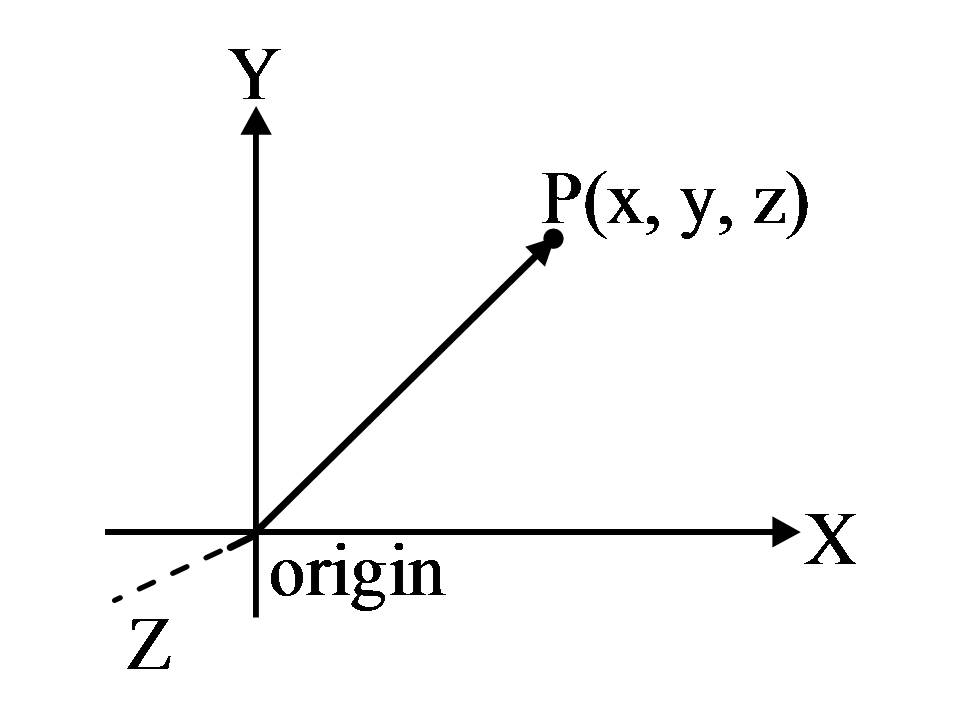
1.3 Position vector :
It is a line segment joining the position of in space to the origin of the reference frame directed from origin to particle.
From the figure, Position vector of the points p is

1.4 Rest & Motion :
If position vector of a particle in a given reference frame does not change with time then it is said to be at rest with respect to that reference frame, and if its position vector changes with time then it is known as in motion with respect to the given reference frame. The state of rest and motion depends on the frame of reference.
Leave a Reply